
Akylly dört aýakly robot


Giriş
Algoritmiň täzelenmegi: Has çeýe we çeýe hereketler
Güýçli päsgelçilikleri ýeňip geçmek ukybyna we ýokary kynçylykly hereketlere eýe boluň
1. Oklardan böküp, ýokary böküp, öň tarapa öwrülip we beýleki kynçylykly hereketleri ýerine ýetirip bilýär
2. 15 sm basgançaklara çykyň, bu bolsa şol bir ölçegdäki dört aýakly robotlaryň ýetip biljek iň ýokary beýikligine deňdir.
3. Yza öwrülmeleri, bedeniň öwrülmelerini, öwrülip böküşleri, el sallamalary, aýda ýöremegi, agdarylyp-döwülmegi we turmagy we ş.m. goldaň.
Ölçeglenip bilinýän ewolýusiýa
Çäksiz giňelmek üçin modul dizaýn
1.4.5 kg pyýada ýük göterijilik giňelme giňişligini ep-esli giňeldýär
2. Ösen duýuş ukybyny ösdürmek interfeýslerini (SDK we API) üpjün etmek
3. Açyk modul gurluşy we interfeýsleri bilen, RTK modullarynyň, 5G, AI hostlarynyň, gyra prosessorlarynyň we dürli sensorlaryň gurnalmagyny goldaýar.
4. Lidar we çuňluk kamerasy bilen enjamlaşdyrylan, awtonom nawigasiýa, awtomatiki päsgelçilikleriň öňüni almak we gaça durmak, wizual ýerleşmek we daşky gurşawy dikeltmek ýaly ösen duýuş ukyplarynyň çuňňur ösdürilmegine mümkinçilik berýär.
Bogunlaryň hereket momentiniň 50% artmagy: Hereketler üçin güýçli güýç
Özbaşdak işlenip düzülen ýokary momentli birleşdirilen hereketlendiriji modullary örän ýokary moment dykyzlygyna, jogap geçirijilik zolagyna we ters geçirijilik netijeliligine eýedir
Maksimum pyýada ýüküň 1,40% artmagy
2. Hereket çydamlylygy iki esse golaý artdy, üznüksiz hereket wagty 90 minut we aralygy 5 km
Senagat derejeli dolandyryş ulgamynyň hasaplaýyş kuwwatynyň 3 esse artmagy
Durnuklylygy we hasaplaýyş güýjüni hemmetaraplaýyn täzelemek üçin senagat derejeli IMU-ny kabul ediň
1. Çuňňur optimizirlenen ýadroly senagat derejesindäki real wagt dolandyryş ulgamynyň ilkinji gezek ornaşdyrylmagy
2. Umumy hasaplaýyş güýji tas 3 esse artdy
3. Ýokary real wagt aragatnaşyk we 1 kHz çenli dolandyryş ýygylygy bilen
Doly täzelenen adam-maşyn özara täsir ulgamy
1. Keçirilen gijikdiriş bilen ilkinji gezek görülende hakyky wagtda surat geçirmek işiniň gowulandyrylmagy
2. Ulanyjylara dört aýakly robotyň dürli statuslaryny real wagt režiminde almaga mümkinçilik berýän ýeňil dil özara täsiri goşuldy.
3. Has howpsuz we has dürli düşünjä esaslanýan hereketler
4. Öňdäki we yzky päsgelçilikleriň öňüni almak, tanamak we yzarlamak, öňe päsgelçilikleriň öňüni almak, awtonom nawigasiýa we beýleki funksiýalary goldamak
Tehniki parametrler
| 1. Apparat platformasy | |
| Duran ölçeg | Uzynlygy 610mm±10mm, Ini 370mm±10mm, Beýikligi 445mm±10mm |
| Ýatan adamyň ululygy | Uzynlygy 680mm±10mm, Ini 370mm±10mm, Beýikligi 175mm±10mm |
| Jemi agram (batareýa bilen) | takmynan 12.2 kg |
| Ýüksüz çydamlylyk | 1.5 sagat ~ 2 sagat, aralygy: 4 km |
| Robot deňagramlylyk üçin doly güýç dolandyryş algoritmini ulanýar. Ol daban basyş sensorlary bolmazdan, aýakda 360° körsüz 3D güýç duýmagyny amala aşyryp bilýär, bu bolsa aýaklaryň az aşynmagyny we az tehniki hyzmat çykdajylaryny üpjün edýär. | |
| Material | Budlar: alýumin lehimi; baldaklary: ýokary berklikli kompozit plastmassa; zyňyndylar: zarba siňdiriji, taýgama garşy we aşynmaga çydamly rezin. |
| batareýa | Şarj edilýän litium batareýasy bilen üpjün edilen; batareýanyň kuwwaty ≥4400mAh, nominal energiýa ≥126.7Wh; zarýad beriş wagty: 40min ~ 1sagat. |
| DOF | Umumy erkinlik derejesi (DOF): 12; Her aýak üçin DOF: 3. |
| bilelikdäki modul | Daşky diametri ≤76 mm bolan integrasiýa edilen birleşdirilen moduly kabul edýär; ýokary moment dykyzlygy motoryndan, ýokary takyklykly reduktordan, absolýut kodlaýjydan we temperatura sensoryndan ybarat. |
| Ikinji derejeli işläp düzmek üçin gurlan güýç çykyşy (5V/12V/24V) we aragatnaşyk interfeýsleri (Ethernet/WiFi). | |
| Gorag režimleri | ýumşak adatdan daşary ýagdaý stop, pes woltly signalizasiýa, ýokary gyzgynlyk signalizasiýa. |
| 2. Hereketi dolandyrmak |
| Senagat derejeli inersial sensory kabul edýär; akselerometriň çözgüdi 0,09 mg çenli, giroskopyň çözgüdi 0,004°/s çenli. |
| Aragatnaşyk şinasynyň dolandyryş ýygylygy: 1kHz. |
| Durnukly ýöremegi we çalt ýöremegi üpjün edýär |
| Basgançaklara, eňňitlere, eňňitlere çykmak ýaly ýöreýişleri goldaýar; iň ýokary dyrmaşma eňňiti: 40° (eňňit materialyna baglylykda); iň ýokary üznüksiz basgançak beýikligi: 15 sm; beton ýollara, çagyl ýollara we ş.m. uýgunlaşyp bolýar. |
| Yzygiderli ýöremek üçin peýdaly ýük: 4,5 kg çenli. |
| Ýerinde ädim ätmegi, öňe/yza/çep/sag terjime etmegi, çep/sag aýlanmagy goldaýar. |
| Dürli görkezme hereketlerini hödürleýär: öňe bökmek, öwrülip bökmek, aý ýöremek we ş.m.; öňe bökmegiň iň ýokary aralygy: 50 sm. |
| Beýleki ýokary öndürijilikli ýöreýişleriň we hereketleriň ösüşine goldaw berýär |
| 3. Akylly duýgy |
| giň burçly kamera*1: gorizontal FOV 130°; 1920 × 1080@30fps; ýalpyldawuklyga garşy, burulmasyz; adam bedenini tanamak we yzarlamak algoritminiň işlenip düzülmegini goldaýar. |
| ultrases radarlar*2: aralygy anyklamak we päsgelçilikleri togtatmak algoritminiň işlenip düzülmegini goldaýar. |
| Öňde we yzda päsgelçilikleriň öňüni almak üçin enjamlar bilen enjamlaşdyrylan. |
| 4. Ikinji derejeli ösüş |
| Robot modelini, hereket SDK-syny we API-ni, hereketi işläp düzmek boýunça demo-ny we jikme-jik ikinji derejeli işläp düzmek boýunça gollanmalary hödürleýär. |
| Jikme-jik ulanyjy we işläp düzmek boýunça gollanmalar bilen duýgy işläp düzmek programma üpjünçiliginiň interfeýslerini üpjün edýär; çalt ikinji derejeli işläp düzmek üçin gurlan ROS ulgamy. |
Kompaniýanyň tanyşdyrylyşy
2008-nji ýylda Pekinde “Beijing Hewei Yongtai Technology Co., LTD” kompaniýasy döredildi. Ol esasan jemgyýetçilik howpsuzlygy kanunlaryna, ýaragly polisiýa, harby gulluklara, gümrük we beýleki milli howpsuzlyk edaralaryna hyzmat edýän ýörite howpsuzlyk enjamlaryny işläp düzmäge we ulanmaga ünsi jemleýär.
2010-njy ýylda Guannan şäherinde Jiangsu Hewei Polisiýa Enjamlaryny Önümçilik Co., LTD kompaniýasy döredildi. 9000 inedördül metr meýdany öz içine alýan ussahana we ofis binasy bilen Hytaýda birinji derejeli ýörite howpsuzlyk enjamlaryny ylmy-barlag we işläp düzmek bazasyny gurmagy maksat edinýär.
2015-nji ýylda Şençžen şäherinde harby-polis gözleg we ösüş merkezi döredildi. Ýörite howpsuzlyk enjamlaryny işläp düzmäge ünsi jemläp, 200-den gowrak görnüşli professional howpsuzlyk enjamlaryny işläp düzdi.






Daşary ýurtlardaky sergiler


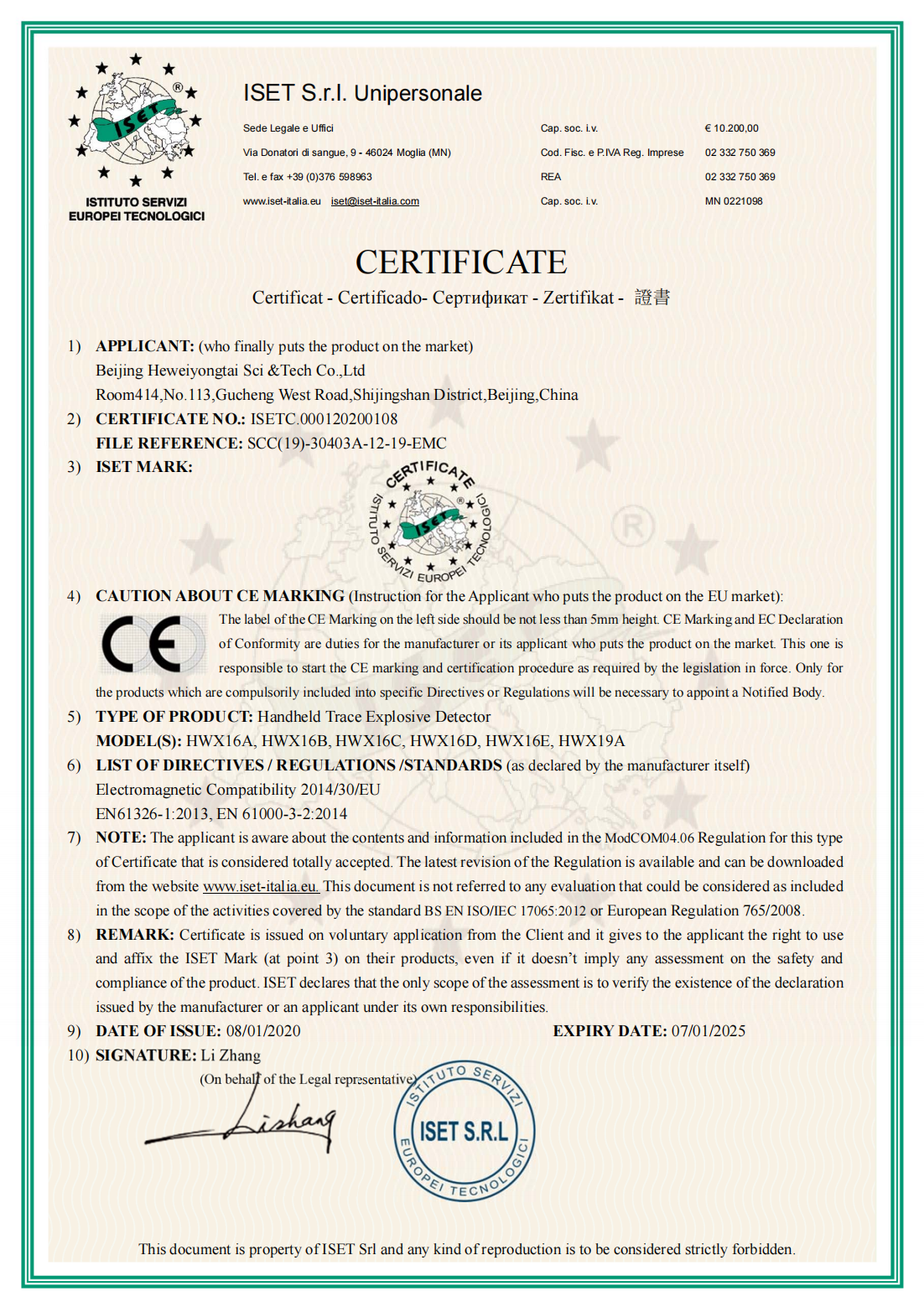
Sertifikatlar

“Beijing Heweiyongtai Sci & Tech Co., Ltd.” kompaniýasy zyýanly gazlaryň zyýanly täsirinden goramak we howpsuzlyk çözgütleriniň öňdebaryjy üpjün edijisidir. Biziň işgärlerimiz size kanagatlanarly hyzmat bermek üçin hünärli tehniki we dolandyryş hünärmenleridir.
Ähli önümler milli hünär derejesindäki synag hasabatlaryna we ygtyýarlandyryş şahadatnamalaryna eýedir, şonuň üçin önümlerimizi sargyt etmekden çekinmäň.
Önümiň uzak möhletli hyzmat möhletini we operatoryň howpsuz işlemegini üpjün etmek üçin berk hil gözegçiligi.
EOD, terrorçylyga garşy enjamlar, aňtaw enjamlary we ş.m. üçin 10 ýyldan gowrak senagat tejribesi bar.
Biz dünýäniň 60-dan gowrak ýurdunda müşderilere professional hyzmat etdik.
Köp harytlar üçin MOQ ýok, sargyt boýunça satyn alnan harytlar üçin çalt eltip bermek.




